


在AVP项目的功能安全开发过程中,ISO 26262扮演着至关重要的角色,但同时也显现出在自动驾驶领域存在不少缺陷,这种矛盾现象确实值得关注。
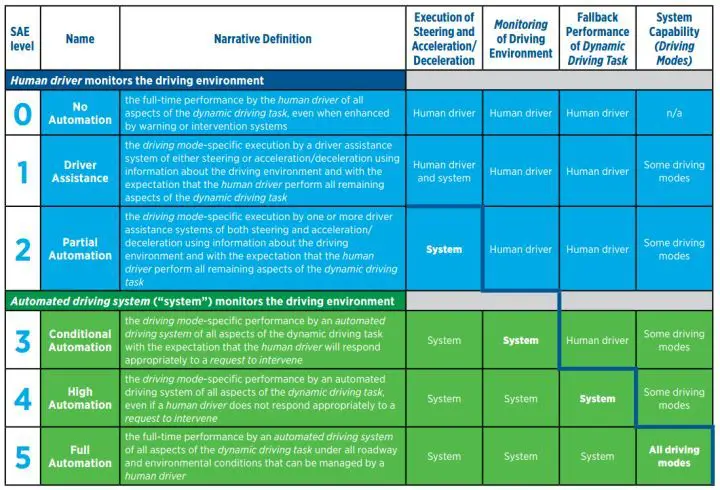
智能驾驶汽车分类
从功能安全层面来看,我们不必过分纠结于等级划分,而是依据系统故障的责任归属,将智能驾驶车辆分为两组。这种划分方式使我们能以全新的眼光来审视智能驾驶车辆的安全问题。众多企业在研发过程中,都依据这一分类来制定各自的安全对策,旨在更有效地应对各类可能的故障风险。
这种分类给后续的功能安全开发提供了指引。比如,在制定安全开发计划时,可以根据不同类型汽车的具体特点,有针对性地建立安全措施,从而实现资源的合理分配,提高开发全过程的效率。
功能安全开发难度变化
故障一旦发生,系统便从报警状态过渡到安全控制模式。这一转变使得功能安全开发的难度大幅提升,对系统架构的要求也发生了根本变化。目前,工程师们需要全面考虑众多复杂因素,例如传感器的可靠性、算法的稳定性等,这些因素对工程师的专业能力提出了更高的挑战。
为了达到这些标准,工程师们不得不加班来优化系统结构。同时,他们还需要增设额外的硬件备份设计,这无疑延长了开发周期,并提高了资金投入。目前,在众多AVP项目中,这种调整所引发的挑战已十分突出。
自动驾驶高开发成本
显而易见,开发满足功能安全的自动驾驶系统费用非常庞大。无论是购置硬件还是编写软件,亦或是进行测试和验证,以及人员的配备,都离不开大量的资金支持。就拿一些高端传感器来说,它们的价格就占据了总成本的大部分。
高昂的成本要求企业在研发阶段格外小心。即便研制出安全性能出色的自动驾驶系统,若价格昂贵,市场接受度也会很低,这无疑构成了一个棘手的困境。众多企业正努力寻求降低成本的方法,不断研究和尝试新的技术和方案。
功能安全的“尴尬地位”

目前,功能安全在车企研发团队中宛如不请自来的客人。若功能安全的花费与回报在合理范围内,它便受到重视;可若成本超出预期,它便可能被忽视。这种现象揭示了车企在安全与成本之间权衡时的困境。
项目预算有限,导致功能安全的某些需求不得不作出让步。这种做法对自动驾驶系统的长远安全发展不利,但在激烈的市场竞争中却难以完全避免。众多汽车制造商正努力寻找一个既能满足需求又不失安全性的平衡点。
系统安全的疑问
企业若都秉持“安全至上”的原则,不惜一切代价确保自动驾驶系统达到功能安全标准,这就能断言系统完全安全了吗?这确实是个值得深入思考的问题。我们不应仅凭成本投入来衡量系统的安全程度。
特斯拉智能驾驶系统曾将红绸误判为障碍物,这案例表明,安全隐患并不仅限于功能层面。即便在功能安全方面投入巨大,并达到了相关标准,仍可能潜藏其他未被察觉的风险。因此,我们不能片面地认为高投入必然带来高安全。
未来发展探索
汽车制造商通过实际操作项目,可以探索出一套完整的功能性安全与SOTIF方法相结合的实施策略。经过持续的操作和经验积累,这套策略将逐步趋于成熟。这为自动驾驶技术的安全性进步注入了信心。
在ISO 26262标准出台前,企业已掌握了一套减少电子电器系统故障率的开发方法。功能安全则是为了进一步减少这种概率。面对自动驾驶这一充满不确定性的领域,企业对故障概率和市场接受度的预估如同赌局。特斯拉则通过良性循环,使智能驾驶系统日趋完善。那么,大家觉得传统工程理念与互联网思维能否在汽车自动驾驶的安全与功能上迅速达成一致?若您觉得这篇文章有参考价值,不妨点赞并分享给更多人。